发布日期:2024-10-24 17:05 点击次数:116

IGOR团队 投稿辉夜姬 反差
量子位 | 公众号 QbitAI
让机械臂师法东说念主类手脚的新阵势来了,不怕缺高质地机器东说念主数据的那种。
微软建议图像缱绻暗示(IGOR,Image-GOal Representation),“投喂”模子东说念主类与实际宇宙的交互数据。
IGOR能径直为东说念主类和机器东说念主学习一个长入的手脚暗示空间,兑现跨任务和智能体的常识搬动以及下流任务效力的培植。
要知说念,在西宾具身智能界限的基础模子时,高质地带有标签的机器东说念主数据是保证模子质地的要道,而径直会聚机器东说念主数据资本较高。
讨论到互联网视频数据中也展示了丰富的东说念主类举止,包括东说念主类是怎样与实际宇宙中的多样物体进行交互的,由此来自微软的参谋团队建议了IGOR。
av片
究竟怎样智商学到东说念主类和机器东说念主长入的手脚暗示呢?
IGOR框架解读IGOR框架如下所示,包含三个基础模子:
Latent Action Model、Policy Model和World Model。
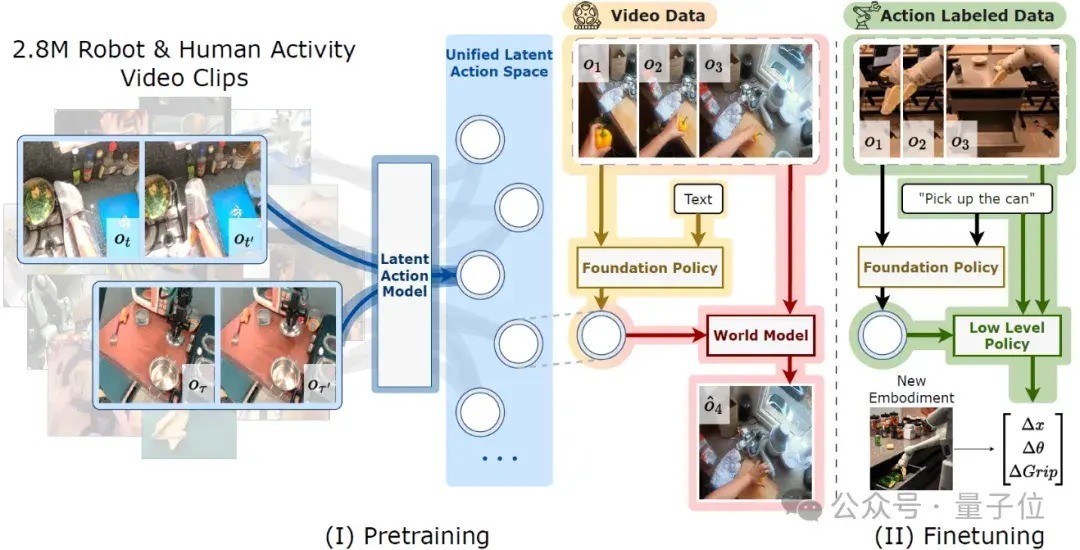
具体来说,IGOR先是建议了潜在手脚模子LAM(Latent Action Model),将运转景色和缱绻景色之间的视觉变化压缩为低维向量,并通过最小化运转景色和手脚向量对缱绻景色的重建吃亏来进行西宾。
这么一来,具有雷同视觉变化的图像景色将具有雷同的手脚向量,代表了他们在语义空间而非像素空间上的变化。
通过LAM,不错将互联网范围的视频数据更始为带有潜在手脚标注的数据,大大推广了具身智能基础模子好像使用的数据量。
这个长入的潜在手脚空间使团队好像在着实随性由机器东说念主和东说念主类推论的任务上西宾Policy Model和World Model。
通过鸠合LAM和World Model,IGOR奏凯地将一个视频中的物体表露“搬动”到其他视频中。而况,这些手脚兑现了跨任务和跨智能体的搬动。
也即是说,用东说念主的步履给机器东说念主作念演示,机器东说念主也能作念出正确的手脚。如下图所示,LAM获取的潜在手脚暗示不错同期兑现跨任务(用手搬动不同物体)和跨智能体(用手的搬动携带机械臂的搬动)的搬动。
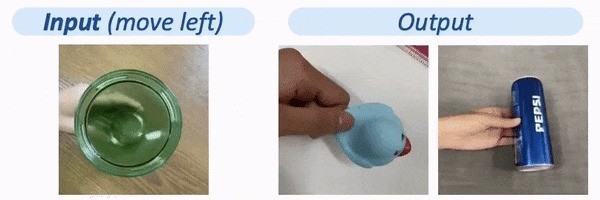
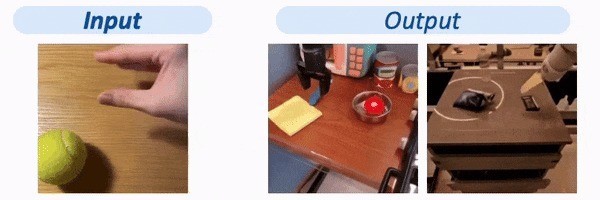
△Latent Action兑现跨任务和智能体的搬动
以下是模子架构的具体细节。
Latent Action ModelLAM的缱绻所以无监督的神态从互联网范围的视频数据中学习和标注潜在手脚,即给定视频帧序列,关于每一双相邻帧索求潜在手脚暗示。
为此,LAM模子由一个Inverse Dynamic Model(IDM)和Forward Dynamic Model(FDM)构成。
IDM的从视频帧序列中索求潜在手脚暗示,而FDM认真用学到的暗示和刻下视频帧来重建接下来的视频帧。
由于将潜在手脚暗示完毕在较低的维度,因此LAM模子会将两帧之间语义上的分手学习到之中。
值得谨慎的是,这种神态自然保证了学到的潜在手脚是具有泛化性的。
如下图所示, 在未见数据集上,LAM学到的雷同潜在手脚反应了雷同的语义,包括大开夹子、机械臂向左搬动和关闭夹子,这些潜在手脚在不同任务间分享,进而培植下流模子的泛化性。

△Latent Action Model在未见数据集上的进展
Foundation World ModelWorld Model的作用是凭据历史视频帧和将来多帧的潜在手脚暗示,生成在历史帧的基础上推论各个潜在手脚之后的将来视频帧。
为此,参谋东说念主员选拔从预西宾的视频生成模子上进行微调,将条目从文本换成了潜在手脚暗示和FDM的重建输出。
在具身智能的相关数据集上进行微调之后,参谋东说念主员不雅察到World Model不错奏凯地在给定换取历史帧时,针对不同的潜在手脚暗示生成相对应的将来视频帧。
如下图所示,此阵势不错通过潜在手脚和World Model限制不同物体的稳固搬动。

△World Model关于给定的不同潜在手脚暗示时的生成完毕
Foundation Policy ModelPolicy Model的缱绻是在具体的下流任务上,凭据视频帧和文本教导来想到智能体每一步要袭取的手脚。
在IGOR中,它的西宾分为了两个阶段。
在第一阶段,Policy Model将凭据输入的视频帧和文本教导来想到LAM索求出的相应的潜在表露暗示,从而建造从视频帧到通用潜在表露暗示的映射。
在第二阶段,该模子则会凭据文本教导、视频帧以收用一阶段模子想到出来的潜在手脚暗示共同想到下流任务上具体的表露标签。
和现存模子比拟,第一阶段想到出的潜在手脚暗示蕴含了完成该任务需要达成的短期缱绻,丰富了模子的输入信息,因此培植了最终政策的任务奏凯率,如下图所示。
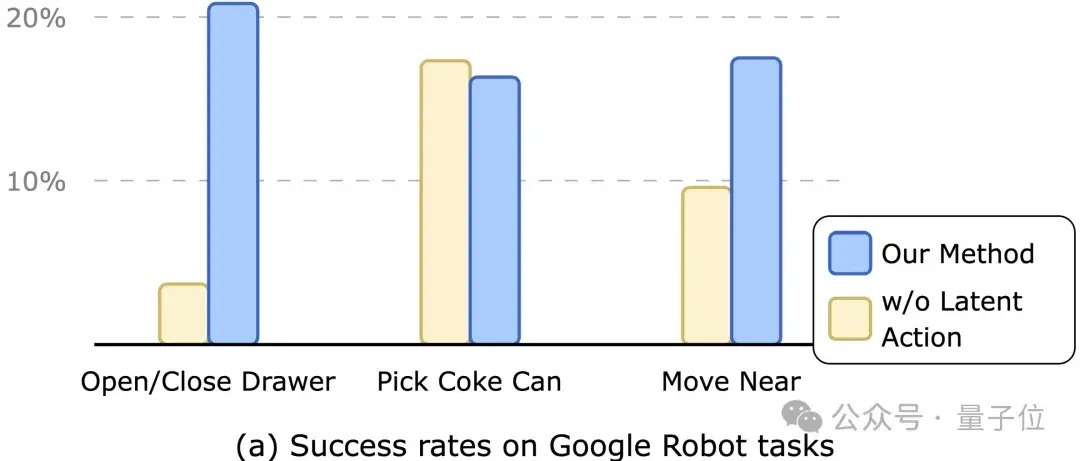
△Policy Model不才游机器东说念主任务上的进展
在换取的场景下给定不同的文本教导,参谋东说念主员也考据了Policy Model的灵验性,即模子不错凭据不同的教导生成相应的潜在手脚暗示,进而通过World Model模拟推论相应的教导。
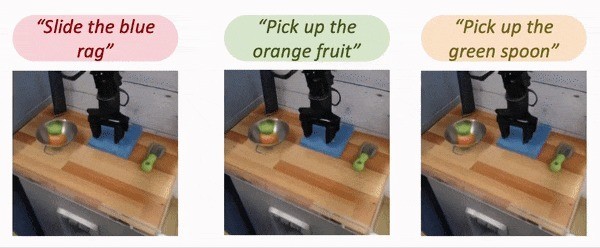
△Policy Model和World Model关于不同文本教导的生成完毕
总的来说,IGOR建议了通过大批东说念主类和机器东说念主视频预西宾学习手脚暗示并泛化到不同任务和智能体的新阵势。通过从大批视频中学到的手脚暗示,IGOR不错兑现机器东说念主轻视师法东说念主类手脚,进而兑现更通用的智能体。
名目主页:https://aka.ms/project-igor论文:https://aka.ms/project-igor-paper
— 完 —
量子位 QbitAI · 头条号签约
存眷咱们辉夜姬 反差,第一技巧获知前沿科技动态